

力覚センサーシステム
力覚センサーシステム
高剛性・高感度な力覚センサーとロボットとの連携が考慮された開発環境で
今まで困難だった力覚制御を必要とする精密な作業を可能にします。


システム構成例
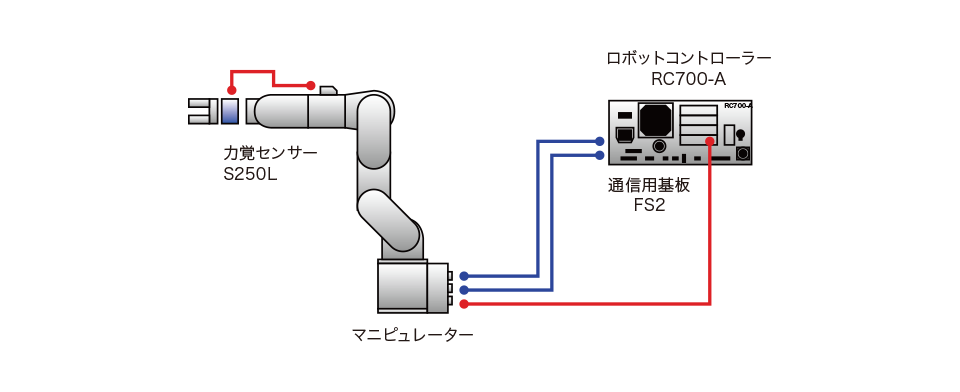
構成例(1)6軸ロボット接続例(C8)
構成例(2)スカラロボット接続例(G10/G20)
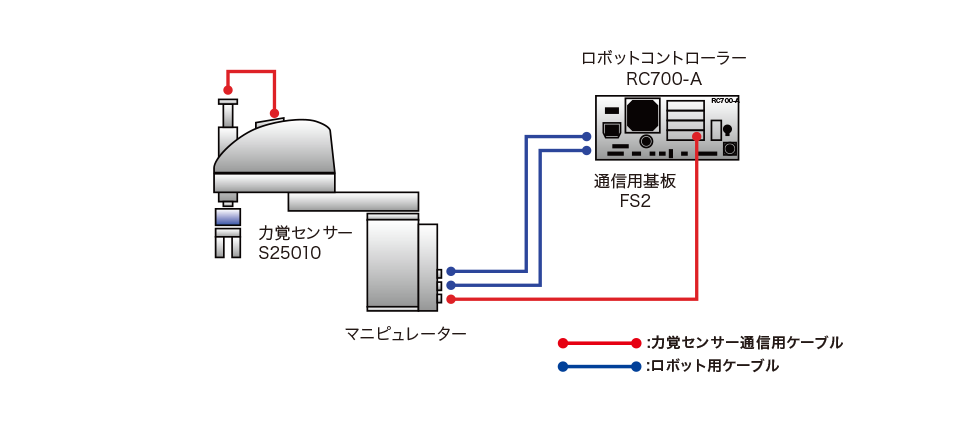
構成例(3)スカラロボット接続例(GXC4/GXC8)

特長
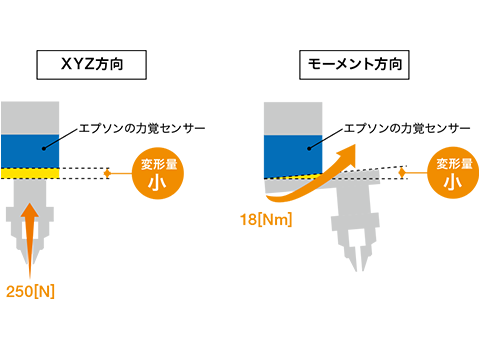
高剛性
XYZ方向の定格荷重 250 [N] 、モーメント(回転)方向 18 [Nm] 。大きな力を加えても変形量が小さい堅牢さを持っています。特に、モーメント方向の力に対して強く、ねじれに強い優れた特長を持っています。
高感度
低ノイズレベル 0.035 [N]、高分解能 0.1 [N](XYZ方向成分)を実現。
優れた分解能で、応答性よく力を検出することができます。
力覚センサーシステムが可能にする難作業
力覚センサー(S250シリーズ)は、ロボットに適切な力感覚を与えることで、教示作業やビジョンだけでは対応できない緻密な作業やワークが壊れやすい繊細な作業など、熟練者の力感覚に頼っていた生産工程の自動化を可能にします。
-
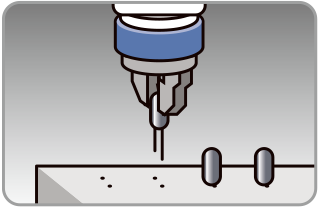
変形しやすい電子部品端子の挿入作業
-
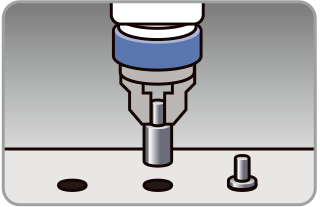
クリアランスの少ない嵌合作業
-
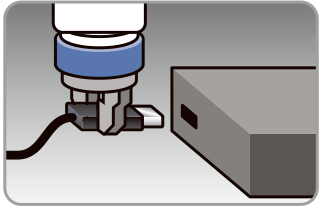
多種多様なコネクターの挿入作業
-
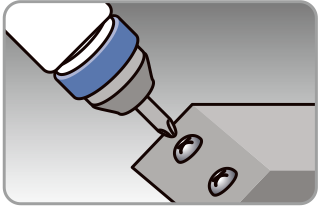
微小ネジの精密ネジ締め作業
-
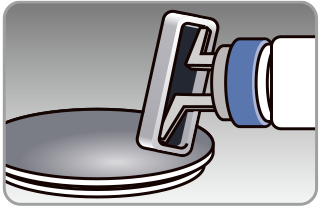
力加減の難しい研磨作業
力覚センサー制御ソフトウェア"Force Guide"
従来のプログラミング言語記述による高度なフォース機能プログラミングだけではなく"Force Guide"で力覚センサーアプリケーションを簡単に作成できます。フォースガイドオブジェクトのアイコンを選択するだけで、力覚センサーシーケンスを作成でき、複雑なプログラミングは不要です。また、シミュレーターの移動方向表示や、力波形の表示・記録機能により、従来困難であったデバッグ作業がスムーズに行えます。
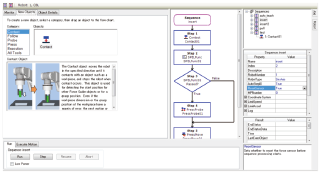
Force Guide
説明を確認しながらアイコンを選択するだけで、力覚センサーシーケンスが作成可能。フローチャートで全体の流れも確認できます。
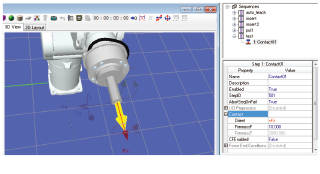
シミュレーター
ロボットの移動方向や設定した力座標軸が確認できます。
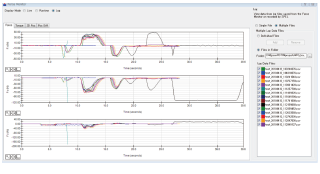
力波形の表示・記録
リアルタイムで力波形の確認ができます。また、保存した波形を読み込むことで、複数条件の比較や同一条件のばらつきの確認が簡単に行えます。
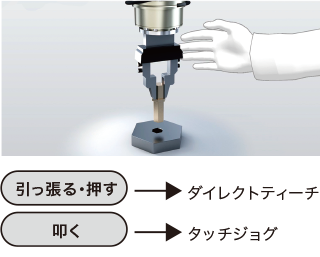
ダイレクトティーチング機能
力覚センサーとティーチペンダント(TP2/TP3/TP4)を使うことで、ダイレクトティーチングが可能です。作業者がロボットを手で動かし、対象物の硬さや柔らかさ、力のかかり方などを直接確かめながら、教示することができます。
タッチジョグ機能注
ダイレクトティーチにタッチジョグ機能を追加することでティーチングの効率化を実現。ダイレクトティーチ実行中にエンドエフェクターを叩くと、叩いた方向にロボットがステップ移動します。ボタン操作等によるダイレクトティーチングとタッチジョグの切り替えは不要で、モード切替はエンドエフェクターへの力加減のみで自動で切り替わります。
TP2に通常のボタン操作によるジョグ&ティーチモードの他にダイレクトティーチングモードが追加され、TP2と6軸ロボットを使用したティーチングがより容易となります。
- (注)
- TP:TP2、ロボット:C、Nシリーズ、コントローラーファームウェア:7.4.6以降
仕様表
| センサーモデル | S250N | S250L | S250P | S250H | S2503 S2506 S25010 |
S250LH 注4 | |
|---|---|---|---|---|---|---|---|
| 適用ロボット | C4 | C8, C12注1 | C8 | N2 | GX RSシリーズ |
N6 | |
| 標準、クリーンルーム仕様 注2 | プロテクション仕様 | ||||||
| サイズ | 直径 80 × 高さ 49 mm | 直径 88 × 高さ 49 mm | 直径 88 × 高さ 66 mm | 直径 80 × 高さ 49 mm | 直径 80 × 高さ 52 mm | 直径 84.5 × 高さ 48 mm | |
| 質量注5 | 460 g | 520 g | 680 g | 460 g | 640 g | 460 g | |
| 対応ロボットコントローラー | RC800-A / RC700-A / RC700-D / RC700-E | ||||||
| 測定自由度 | 6軸:力成分Fx, Fy, Fz 3方向 、モーメント成分Tx, Ty, Tz 3方向 | ||||||
| 定格荷重 | Fx, Fy, Fz:250 N / Tx, Ty, Tz:18 N・m | ||||||
| 静的許容荷重 | Fx, Fy, Fz:1000 N / Tx, Ty, Tz:36 N・m | ||||||
| 測定分解能 | Fx, Fy, Fz:±0.1 N以下 / Tx, Ty, Tz:±0.003 N・m | ||||||
| 測定精度 | ±5 % R.O.以下 | ||||||
| 動作環境 | 温度 | -10~40 ℃ | |||||
| 湿度 | 10~80 %Rh 結露なきこと | ||||||
| 通信ケーブル長 (ロボット←→通信用基板または通信用ボックス間) |
3 m / 5 m / 10 m / 20 m | 3 m / 5 m / 10 m | 3 m / 5 m / 10 m / 20 m | ||||
| 保護等級 | IP67(S250P), IP20(S250N, S250L S250H, S2503, S2506, S25010, SH250LH) | IP20 | |||||
| 同梱品 | 通信用基板 FS2注6、 通信用ケーブル、ロボット取付用フランジ | ||||||
- 注1
- Epson RC+ Ver.7.5.2以降
- 注2
- ケーブル部(ユーザー配線部分)からのパーティクルは考慮していません。
- 注4
- 中空ケーブルに対応しています。
- 注5
- 力覚センサー本体と取付用フランジを合わせた質量。ケーブルは除く。
- 注6
- RC800-A用には通信用基板は含まれません。
動画紹介
力覚センサーシステムについて


関連情報
お問い合わせ
購入・導入前のご相談、お見積をご希望のお客様は、
下記お問い合わせフォームよりお気軽にご相談ください。
サービス・サポート内容については下記ページをご参照ください。