

全方位可動天吊りモデル RSシリーズ
全方位可動天吊りモデル
RSシリーズ
製品概要
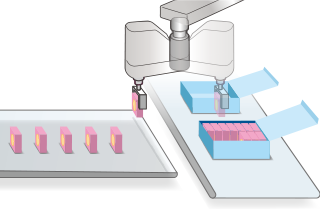
スペースを有効活用、小型部品や素材の組立やパレタイジング作業に適しています。
特長
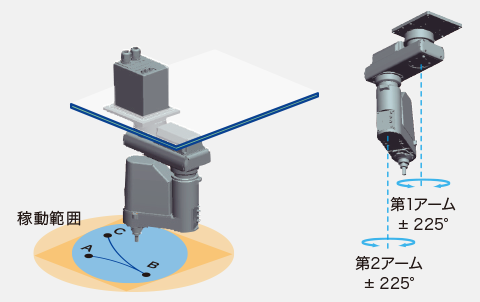
- フレキシブル:天井取付により広い可動領域
- 使い勝手:フットプリントフリーにより作業スペースをフル活用
-

RS3
- 最大可搬質量
- 3 kg
- アーム長
- 350 mm
-

RS4
- 最大可搬質量
- 4 kg
- アーム長
- 550 mm
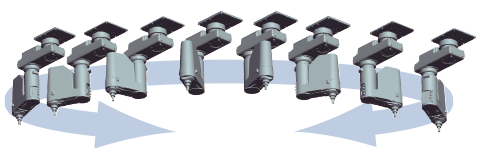
省スペースと広い動作範囲を両立できる天吊型
天吊り & 回旋アーム採用
全方向へ最適距離でアクセスすることで大幅なタクトタイム向上を実現
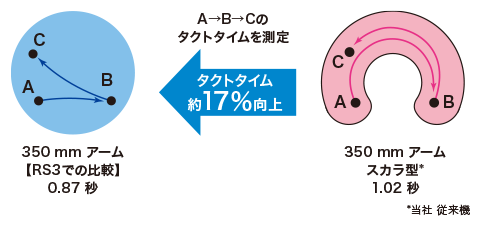
第1アームの下を第2アームが通過できる新機構
直交座標型や従来の大型スカラよりコンパクトな装置構築が可能
構成例
パレタイジング作業
| 商品名 | 備考 | 標準価格(税別) |
|---|---|---|
| スカラロボット | RS3 | |
| Epson RC+ | プログラム開発ソフトウェア | |
| フィールドバス | CC-Link, EtherNet/IP™ 等 | |
| ティーチペンダント | TP2 | |
| 画像処理システム | コンパクトビジョン, 2Mカメラ, レンズ等 |
- (注)
- 自動化に必要となるエプソン製品以外については上記価格に含まれておりません。
仕様表・型名
| モデル名 | RS3 | ||||||
|---|---|---|---|---|---|---|---|
| 型名 | RS3-351□ | ||||||
| アーム長 | 第1+第2関節 | 350 mm | |||||
| 可搬質量(負荷) | 定格 | 1 kg | |||||
| 最大 | 3 kg | ||||||
| 繰り返し精度 | 第1+第2関節 | ±0.01 mm | |||||
| 第3関節 | ±0.01 mm | ||||||
| 第4関節 | ±0.01 deg | ||||||
| 標準サイクルタイム注1 | 0.34 sec | ||||||
| 最大動作速度注2 | 第1+第2関節 | 6237 mm/sec | |||||
| 第3関節 | 1100 mm/sec | ||||||
| 第4関節 | 2600 deg/sec | ||||||
| 第4関節許容慣性モーメント注3 | 定格 | 0.005 kg・m² | |||||
| 最大 | 0.05 kg・m² | ||||||
| 第3関節押し込み力 | 150 N | ||||||
| 環境仕様 | S:標準, C:クリーン注4&ESD(静電気対策) | ||||||
| 取付仕様 | 天井取付 | ||||||
| 本体質量(ケーブルの質量含まず) | 17 kg | ||||||
| 対応コントローラー | RC700-A | ||||||
| ユーザー配線 | D-sub15pin | ||||||
| ユーザー配管 | φ4 mmエアチューブ×1, φ6 mmエアチューブ×2:耐圧0.59 MPa[6 kgf/cm²] | ||||||
| 電源電圧 | AC200-240 V 単相 | ||||||
| 電源容量注5 | 1.2 kVA | ||||||
| パワー&シグナルケーブル長 | 3 m / 5 m / 10 m / 15 m / 20 m | ||||||
| 安全規格 | CEマーク, KCマーク, UL | ||||||
- 注1
- 粗位置決めアーチモーション(水平300 mm 垂直25 mm 往復)において、1 kg搬送時の最速となる動作ポイント・動作関連設定における動作時間です。
- 注2
- PTP命令の場合
- 注3
- 負荷の重心が、第4関節中心位置と一致している場合。重心位置が、第4関節中心位置を離れた場合は、INERTIA命令でパラメーターを設定してください。
- 注4
- クラス ISO 3(ISO14644-1)
- 注5
- 動作環境、動作プログラムにより異なります。






関連情報
お問い合わせ
購入・導入前のご相談、お見積をご希望のお客様は、
下記お問い合わせフォームよりお気軽にご相談ください。
サービス・サポート内容については下記ページをご参照ください。