

省スペースコストパフォーマンスモデル Tシリーズ
省スペースコストパフォーマンスモデル
Tシリーズ
製品概要
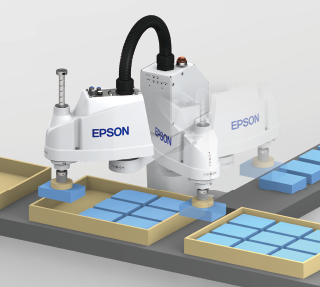
スペースが限られた場所での単純な箱詰め梱包やバラ積み作業に適しています。
特長
- 省スペース:コントローラー一内臓
- 省エネ・省電力:100V電力稼働
- メンテナンス性:バッテリーレス
- 食品グリス仕様モデルあり
-

T3
- 最大可搬質量
- 3 kg
- アーム長
- 400 mm
-

T6
- 最大可搬質量
- 6 kg
- アーム長
- 600 mm
使いやすく、高い運用性で人手作業の単純搬送を自動化
今までコストが合わず見送ってきた単純な人手作業の自動化を可能に

省スペース&簡単設置コントローラ内蔵
コントローラーを本体に内蔵することで、設置スペースを削減。また、ケーブル配線も省略でき、シンプルに設置、移設が可能
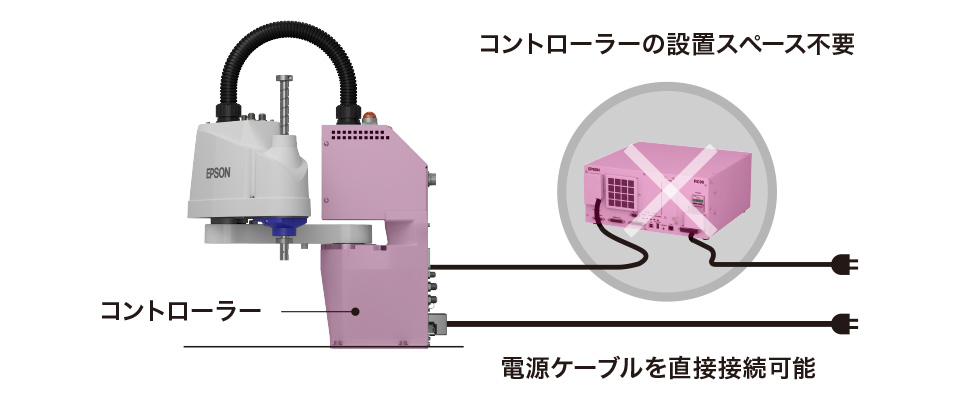
AC100Vでも稼働可能
幅広い電源電圧に対応。200-240V電源がない場所にて動作可能
- AC100V~240Vで稼働
- 100-115V電源しかない医療系ラボ、教育施設など使用可能
構成例
構成例(ティーチングの場合)
| 商品名 | 備考 | 標準価格(税別) |
|---|---|---|
| スカラロボット | T3 | |
| Epson RC+ | プログラム開発ソフトウェア | |
| フィールドバス | CC-Link,EtherNet/IP™ 等 | |
| ティーチペンダント | TP2 |
- (注)
- 自動化に必要となるエプソン製品以外については上記価格に含まれておりません。
単純な箱詰め作業(画像処理システム使用の場合)
| 商品名 | 備考 | 標準価格(税別) |
|---|---|---|
| スカラロボット | T3 | |
| Epson RC+ | プログラム開発ソフトウェア | |
| フィールドバス | CC-Link,EtherNet/IP™ 等 | |
| ティーチペンダント | TP2 | |
| 画像処理システム | コンパクトビジョン、2Mカメラ、レンズ等 |
- (注)
- 自動化に必要となるエプソン製品以外については上記価格に含まれておりません。
仕様表・型名
| モデル名 | T3 | T3(食品グリス仕様モデル) | |
|---|---|---|---|
| 型名 | T3-B401S | T3-B401S-FZ | |
| アーム長 | 第1+第2関節 | 400 mm | 400 mm |
| 可搬質量(負荷) | 定格 | 1 kg | 1 kg |
| 最大 | 3 kg | 3 kg | |
| 繰り返し精度 | 第1+第2関節 | ±0.02 mm | ±0.02 mm |
| 第3関節 | ±0.02mm | ±0.02mm | |
| 第4関節 | ±0.02 deg | ±0.02 deg | |
| 標準サイクルタイム注1 | 0.52 sec | 0.52 sec | |
| 最大動作速度注2 | 第1+第2関節 | 3700 mm/sec | 3700 mm/sec |
| 第3関節 | 1000 mm/sec | 1000 mm/sec | |
| 第4関節 | 2600 deg/sec | 2600 deg/sec | |
| 第4関節許容慣性モーメント注3 | 定格 | 0.003 kg・m² | 0.003 kg・m² |
| 最大 | 0.01 kg・m² | 0.01 kg・m² | |
| 第3関節押し込み力 | 83 N | 83 N | |
| 環境仕様 | 標準(IP20) | 標準(IP20) | |
| 取付仕様 | 架台取付 | 架台取付 | |
| 本体質量(ケーブルの質量含まず) | 14 kg | 14 kg | |
| 対応コントローラー | コントローラー内蔵(一体型) | コントローラー内蔵(一体型) | |
| ユーザー配線 | D-sub15pin | D-sub15pin | |
| ユーザー配管 | φ4 mmエアチューブ×1, φ6 mmエアチューブ×2:耐圧0.59 MPa[6 kgf/cm²] | φ4 mmエアチューブ×1, φ6 mmエアチューブ×2:耐圧0.59 MPa[6 kgf/cm²] | |
| 電源電圧 | AC100-240 V | AC100-240 V | |
| 電源容量注4 | 0.66 kVA | 0.66 kVA | |
| 電源ケーブル長 | 5 m | 5 m | |
| 安全規格 | CEマーク, KCマーク | -注5 | |
- 注1
- 粗位置決めモーション(水平300 mm 垂直25 mm 往復)において、1 kg搬送時の最速となる動作ポイント(動作関連設定)における動作時間です。
- 注2
- PTP命令の場合
- 注3
- 負荷の重心が、第4関節中心位置と一致している場合。重心位置が、第4関節中心位置を離れた場合は、INERTIA命令でパラメーターを設定してください。
- 注4
- 動作環境、動作プログラムにより異なります。
- 注5
- 欧州、韓国、インドには販売できません。(現地の法規制に対応不可)そのため、CE, UKCAマークへの適合を宣言しておらず、KC/KCs認証も取得していません。
動画紹介
T3モデルについて
省スペースコストパフォーマンスモデル Tシリーズと連携!




関連情報
お問い合わせ
購入・導入前のご相談、お見積をご希望のお客様は、
下記お問い合わせフォームよりお気軽にご相談ください。
サービス・サポート内容については下記ページをご参照ください。
商標について
(注) 本媒体上の他者商標の帰属先は、 商標について をご確認ください。